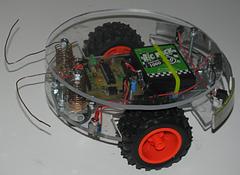
The Bug Bot is a robot that uses bump sensors to navigate around a room like a Roomba. There is no real purpose for this robot, just a chance to test out some different types of bump sensors.
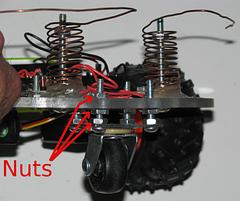
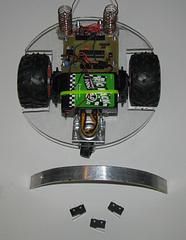
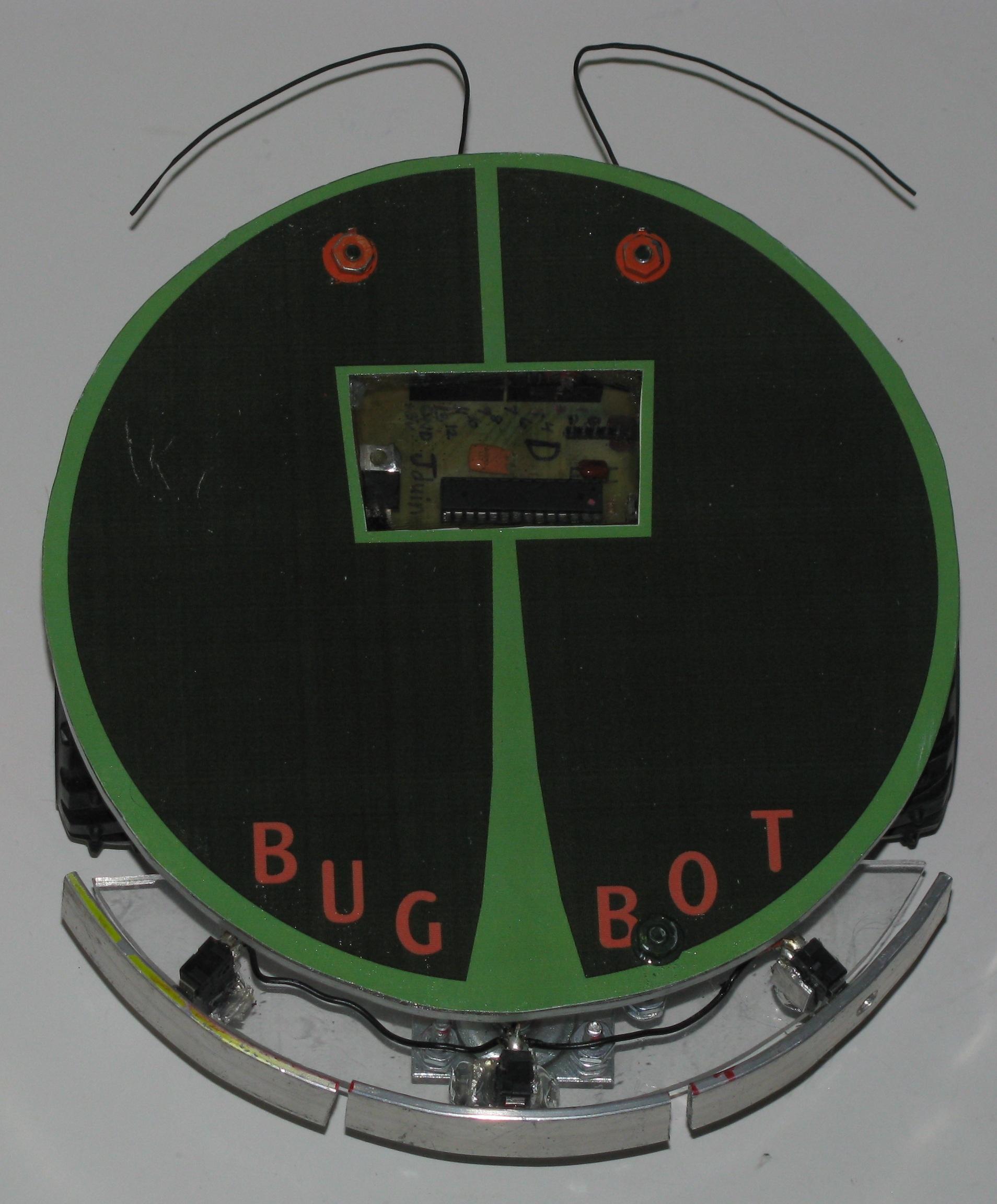
The rear sensors are aluminum braces mounted to momentary button switches that determine what portion of the bot has been bumped. There are 3 bump sensors on the rear of the bot - left, right, and center. Depending on what sensor is bumped, the robot will choose a different path.
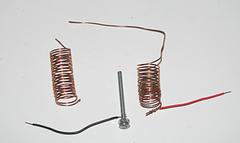
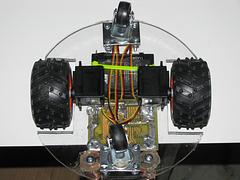
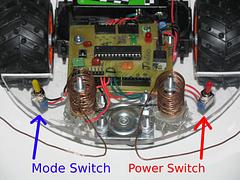
Likewise, the front of the bot has 2 sensors to detect objects. The sensors are made of copper wire coiled into the shape of an antennae with a bolt in the center. The copper coil is connected to an input pin on the Arduino and the bolt is connected to Ground. When an object touches the copper coil, it causes the copper to touch the bolt which in turn lets the Arduino know that it has touched something so it can turn.
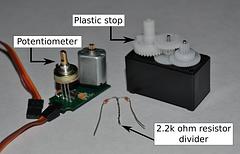
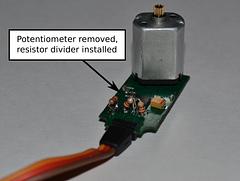
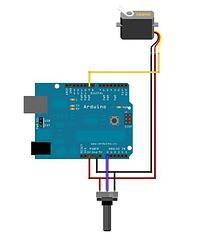
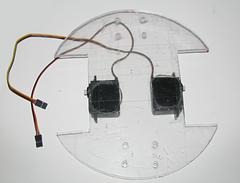
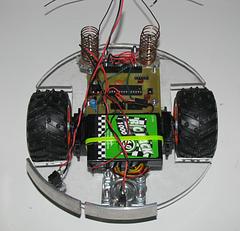
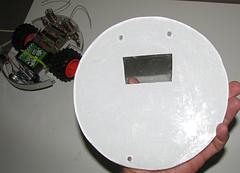
This robot has no motor-controller, as I just modified the Servo motors for continuous rotation and utilize the internal motor-controller that is built into the Servo. So driving these motors is as simple as providing a 5v supply from the batteries, a Ground wire, and a positioning pulse from the Arduino to determine the direction and speed of each motor.
The code for the Bug bot is very simple and is meant only to keep navigate around a room and turn when it bumps into something.
Image Gallery