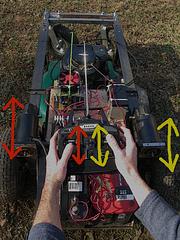
The Lawnbot400 is a remotely controlled lawnmower that I built several years ago to mow my lawn. It is basically a push lawnmower attached to a large remotely controlled frame.
The frame was built to accomodate 2 front caster wheels from Harbor Freight, 2 rear drive motors from a power wheelchair, and 2 large marine deep-cycle batteries for power. The frame has also had several different accessories mounted to it in the past, including remote headlights, remote lawnmower kill switch, and a dump bucket on top for hauling dirt across the yard.
Originally I designed a high power motor-controller to drive the bot and an Arduino microcontroller to read the control signals directly from the R/C receiver and convert the control signals into analog signals that would command the motor-controller. This worked well for several years, but there was no way to limit the current going through the motor-controller and eventually I pushed it too hard and broke it. At that point, I knew that I was going to be using the Lawnbot quite frequently so I bought a Sabertooth 2x25 motor-controller with built-in current limiting. The Sabertooth also has a built-in microcontroller, so while you can control it with an Arduino if desired, you can also interface it directly to an R/C receiver for easy setup in a project.
I have upgraded the Lawnbot several times in the past few years, but it has the same basic design that it started out with and still cuts my grass every few weeks.
If you are building your own Lawnbot and have questions, feel free to give me a shout on the forums:
http://prototyperobotics.com/forums/lawnbot400
And here are a few videos:
Image Gallery